Language



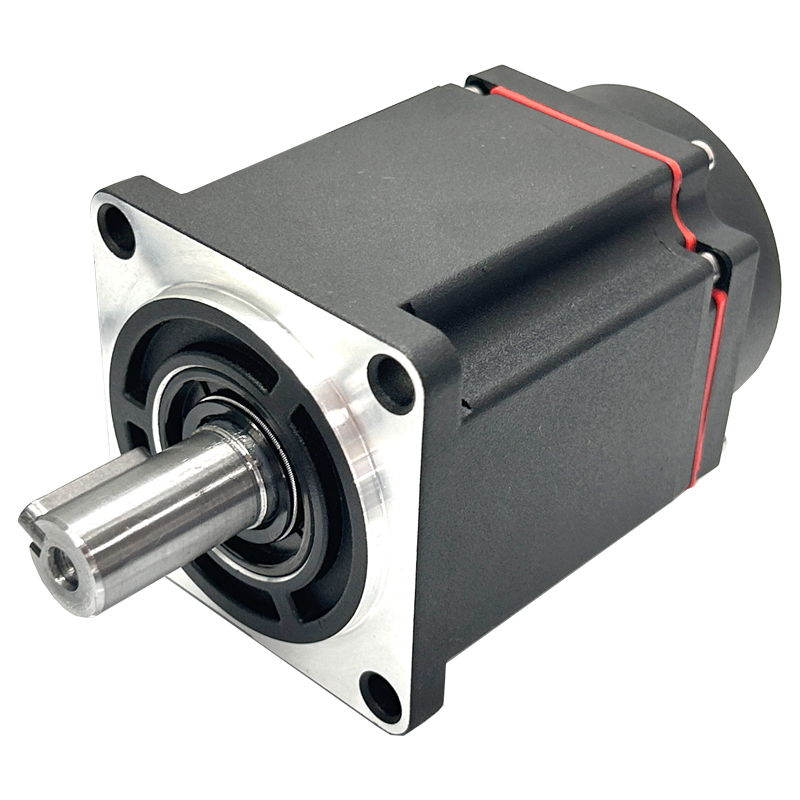
●體積小巧,結(jié)構(gòu)緊湊,大大節(jié)省安裝空間●智能PID控制算法和PDFF控制器結(jié)合,提高了位置與速度控制的快速性與準(zhǔn)確性●支持編碼器信號(hào)任意分頻比設(shè)定,更加精確●支持負(fù)載擾動(dòng)觀測(cè)器,可進(jìn)行轉(zhuǎn)矩前饋補(bǔ)償,提高了系統(tǒng)動(dòng)態(tài)響應(yīng)慣量識(shí)別和自動(dòng)增益功能簡(jiǎn)化了系統(tǒng)調(diào)試過程●調(diào)試軟件支持,可進(jìn)行機(jī)械特性分析,參數(shù)設(shè)定、見識(shí)等

●體積小巧,結(jié)構(gòu)緊湊,大大節(jié)省安裝空間●智能PID控制算法和PDFF控制器結(jié)合,提高了位置與速度控制的快速性與準(zhǔn)確性●支持編碼器信號(hào)任意分頻比設(shè)定,更加精確●支持負(fù)載擾動(dòng)觀測(cè)器,可進(jìn)行轉(zhuǎn)矩前饋補(bǔ)償,提高了系統(tǒng)動(dòng)態(tài)響應(yīng)慣量識(shí)別和自動(dòng)增益功能簡(jiǎn)化了系統(tǒng)調(diào)試過程●調(diào)試軟件支持,可進(jìn)行機(jī)械特性分析,參數(shù)設(shè)定、見識(shí)等

●體積小巧,結(jié)構(gòu)緊湊,大大節(jié)省安裝空間●智能PID控制算法和PDFF控制器結(jié)合,提高了位置與速度控制的快速性與準(zhǔn)確性●支持編碼器信號(hào)任意分頻比設(shè)定,更加精確●支持負(fù)載擾動(dòng)觀測(cè)器,可進(jìn)行轉(zhuǎn)矩前饋補(bǔ)償,提高了系統(tǒng)動(dòng)態(tài)響應(yīng)慣量識(shí)別和自動(dòng)增益功能簡(jiǎn)化了系統(tǒng)調(diào)試過程●調(diào)試軟件支持,可進(jìn)行機(jī)械特性分析,參數(shù)設(shè)定、見識(shí)等

●體積小巧,結(jié)構(gòu)緊湊,大大節(jié)省安裝空間●智能PID控制算法和PDFF控制器結(jié)合,提高了位置與速度控制的快速性與準(zhǔn)確性●支持編碼器信號(hào)任意分頻比設(shè)定,更加精確●支持負(fù)載擾動(dòng)觀測(cè)器,可進(jìn)行轉(zhuǎn)矩前饋補(bǔ)償,提高了系統(tǒng)動(dòng)態(tài)響應(yīng)慣量識(shí)別和自動(dòng)增益功能簡(jiǎn)化了系統(tǒng)調(diào)試過程●調(diào)試軟件支持,可進(jìn)行機(jī)械特性分析,參數(shù)設(shè)定、見識(shí)等

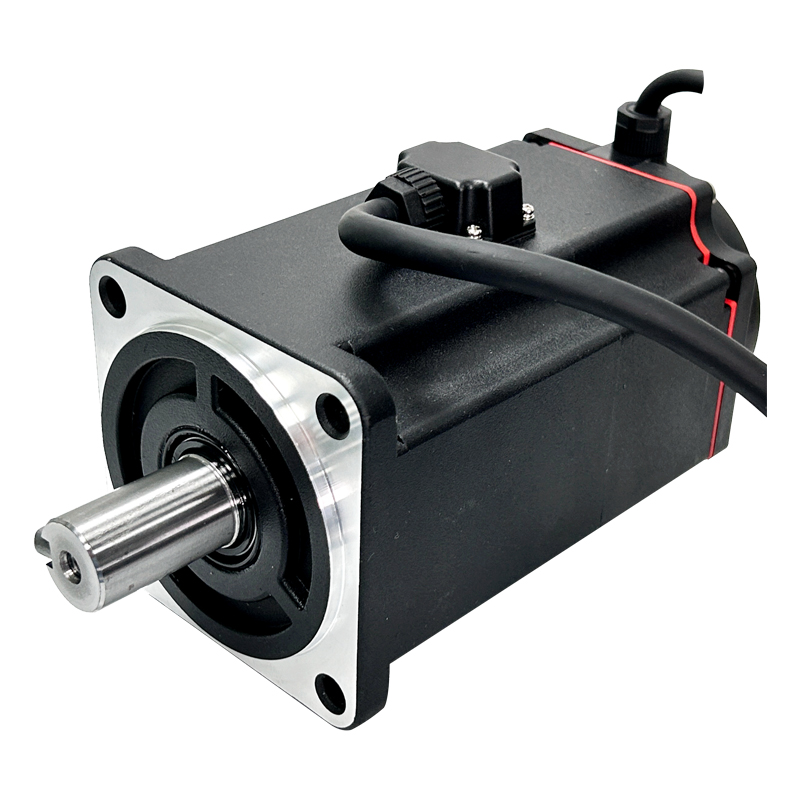
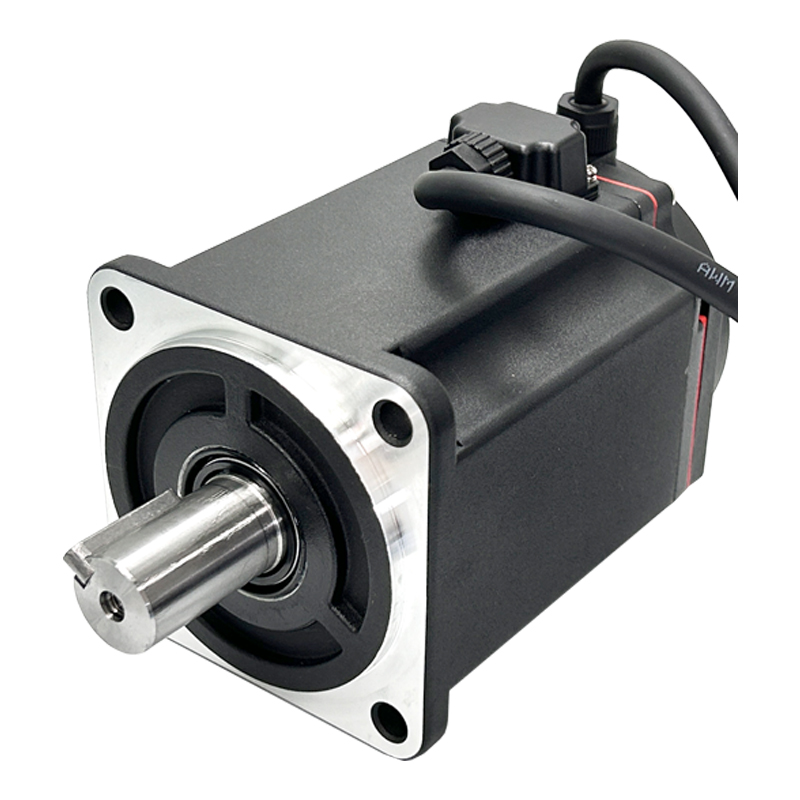
帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米
帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米
帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米
帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

額定功率2300W、帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米
額定功率3000W、帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米
額定功率3800W、帶485通訊、速度模式、力矩模式、位置模式含動(dòng)力線3米,編碼器線3米,脈沖信號(hào)線1米

微信客服

微信公眾號(hào)
2024 ? 無錫三拓電氣設(shè)備有限公司 | 網(wǎng)站部分素材來源于網(wǎng)絡(luò),如有侵權(quán)請(qǐng)聯(lián)系,立即刪除。 蘇ICP備2022000529號(hào)-1
技術(shù)支持:眾鼎合聯(lián)











